

Cовременное оборудование во всех отраслях промышленности постоянно совершенствуется с целью повышения производительности. Проектировщики линий по производству пищевых, фармацевтических, канцелярских и многих других типов товаров массового спроса сталкиваются с необходимостью экономии долей секунд в цикле машины в борьбе за повышение производительности.
Именно для таких задач компания Festo создала несколько типов высокопроизводительных электромеханических приводов: HSP-AE, HSW-AP и 3-D DGE-RF. Особенностью высокопроизводительных электромеханических приводов Festo является оптимизированная механическая часть и применение электродвигателей с высокой динамикой. В основу концепции положен принцип «перемещения минимально возможной массы».
Обычно для осуществления перемещения объекта по двум координатам, например для перекладки изделия с одного конвейера на другой в процессе движения по производственной линии, располагают один линейный привод на подвижной части другого (рис.1, 2).

Рисунок 1.
В такой компоновке для движения изделия приходится перемещать также и массы приводов. В 3-х координатной системе (рис. 2) потребуется перемещать приводы координат Y и Z, масса которых в зависимости от длин и типоразмеров может достигать нескольких десятков килограмм.

Рисунок 2.
Например, в задаче перемещения массы 5кг на расстояния 500×500×200 мм масса перемещаемых деталей может достигнуть 30…40 кг. Это снижает динамику, приводит к возникновению значительных нагрузок на станину при разгоне и торможении и, как следствие ухудшает точность и увеличивает цикл работы машины. Учитывая недостатки типовых конструктивных решений, перечисленные выше, компания Festo разработала 3 типа специализированных высокоскоростных приводов, которые незаменимы в случае наличия высоких требований к производительности. HSP-AE — высокоскоростной двухкоординатный электромеханический перекладчик (рис.3) позволяет перемещать массы до 1,5 кг на расстояние по горизонтали до 170 мм, вертикали — до 70 мм и временем цикла (прямое+обратное движение) до 0,7 с.
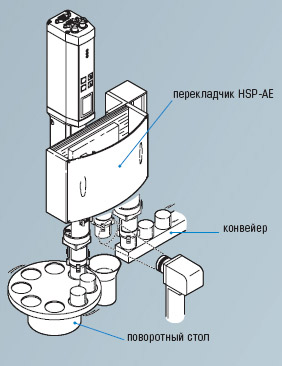
Рисунок 3.
Кроме того, наличие электродвигателя в качестве приводного элемента дает возможность осуществлять остановки в промежуточных позициях траектории. Такие остановки необходимы, например, при несовпадении циклов конвейеров, между которыми установлен перекладчик, или в случае осуществления дополнительных операций контроля, тестирования и т. п. Механика привода HSP-AE представляет собой пару перпендикулярных направляющих, соединенных кареткой, траектория движения которой определяется движением направляющего штифта в пазу плиты (рис. 4). Конструкция плиты и наличие регулируемых упоров в конечных положениях позволяет регулировать ход перемещения по горизонтали и вертикали, точно подстраиваясь под расстояние между конвейерами и учитывая разность высот между ними. Точность и качество изготовления механических элементов, а также применение передовых технологий обработки материалов и специальных смазок обеспечивает бесперебойную работу механической части привода в течении нескольких лет до проведения необходимых регламентных работ по смене смазки направляющих.
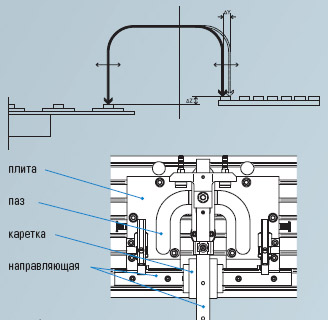
Рисунок 4.
Похожее конструктивное решение применено также в высокоскоростном угловом электромеханическом перекладчике HSW-AP (рис. 5, 6). Этот тип перекладчика отличается перемещением изделия с поворотом на регулируемый угол 80–100 градусов. При этом очень важно наличие линейных участков в начале и конце хода (длина этих участков также регулируется), что позволяет забирать и укладывать изделие строго перпендикулярно поверхности. Это требование особенно важно в сборочных операциях, а также укладке в тару, магазин и т.д.
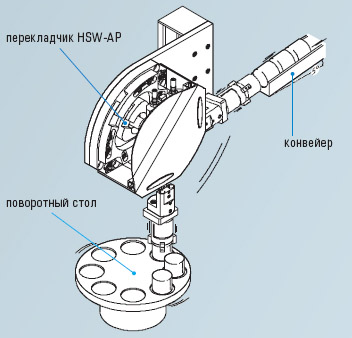
Рисунок 5.
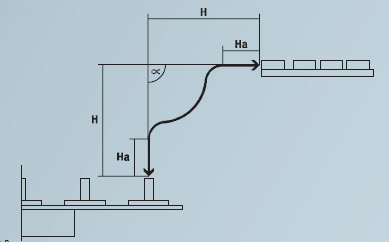
Рисунок 6.
Рассмотренные типы двухкоординатных электромеханических приводов HSP-AE обычно применяются в сочетании с подающими/забирающими конвейерами или поворотными столами. В случае же, когда требуется распределение изделий по плоскости или в пространстве, например, при укладке в тару, сборке объектов сложной пространственной конфигурации или перемещении по трехмерной траектории, применяется 3-D высокоскоростная система 3-D DGE-RF (рис. 7).
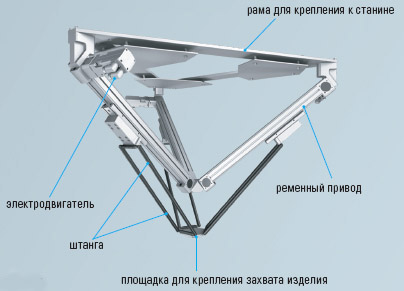
Рисунок 7.
Множество задач, начиная от укладки йогуртов в коробки, установки микросхем на печатные платы, наполнения флаконов с лекарственными препаратами и заканчивая трехкоординатным перемещением клеевой головки или дефектоскопического датчика, охватывает высокоскоростная система 3-D DGE-RF благодаря своей высокой компактности, простоте эксплуатации и высокой динамике (рис. 8).

Рисунок 8.
Уникальной особенностью кинематической схемы 3-D DGE-RF является предельная минимизация перемещаемой массы. Это дает возможность приводам развивать максимальные скорости и ускорения, получая минимальное время цикла при работе системы. Как отмечалось выше, в обычной кинематической компоновке перемещаемая масса без рабочей нагрузки (изделия) может достигать нескольких десятков килограмм, в то время как в системе 3-D DGE-RF она составляет всего несколько сотен грамм. В зависимости от требований к массе рабочей нагрузки и ходам перемещения по координатам X, Y, Z может быть выбран один из трех типоразмеров 3-D DGE-RF: 360, 500 или 600. Исходя из кинематической схемы, рабочее пространство системы представляет собой вертикальный цилиндр с диаметром основания d и высотой h. Для соответствующих типоразмеров систем, параметры рабочего пространства составляют: 3-D DGE-RF 360: h=150 мм, d=300 мм/500: h=200 мм, d=500мм/600: h=250мм, d=750 мм.
Масса полезной нагрузки может достигать до 5 кг при скорости до 3,5 м/c и ускорении до 50 м/с2. 3-D DGE-RF комплектуется контроллером CMXR, обеспечивающим управление системами с 6-ю степенями свободы. Модульная конструкция контроллера дает возможность включать в его состав необходимые платы цифровых и аналоговых входов, а также интерфейсные модули для управления, например, пневмораспределителями и пневмоостровами, что позволяет использовать единый управляющий центр для всех механизмов системы. В качестве механизмов может использоваться широкая номенклатура пневмосхватов, пневмоцилиндров, поворотных пневмоприводов и вакуумных захватов Festo. Кроме того имеется надежная и эргономичная консоль управления для быстрого запуска, настройки и обучения системы (рис. 9).
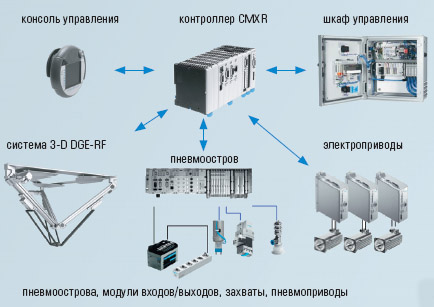
Рисунок 9.
Широкая номенклатура высокоскоростных электромеханических приводов компании Festo: HSP-AE, HSW-AP и 3-D DGE-RF в сочетании с контроллерами управления, пневматическими и электрическими приводами позволяют строить на их основе самые современные системы перемещения, отвечающие высоким требованиям надежности и быстродействия пищевой, упаковочной, полиграфической, фармацевтической, электронной и многих других отраслей промышленности. Компания Festo поставляет не только отдельные компоненты систем перемещения, но также оказывает услуги по подбору оборудования, поставкам собранных и оттестированных электромеханических комплектных систем, а также шкафов управления к ним.

Comments (0)
Twitter
Facebook
Pinterest
E-mail