
Компания igus на международной выставке Hanover Fair 2010 представила инновационную систему модулей-шарниров для роботов. Раньше разработчикам роботов приходилось использовать комплексные решения из множества отдельных компонентов. Сейчас igus ищет бета-тестеров для своего нового продукта. Шарниры в системе Robolink контролируются натяжением кабеля, подобно принципу действия костей и сухожилий в человеческом теле. Все информационные кабели проведены через сочлененные руки, которые фактически являются «скелетом» робота. Эти кабели передают изображения, звуки и усиление, что является искусственными органами чувств гуманоидов.
Простая модульная система
Доктор Рудольф Баннаш (Rudolf Bannasch) является Управляющим директором компании EvoLogics в Берлине, работающей в сфере высоких технологий, бионики и антропоморфных роботов. Он предоставил научно-производственную поддержку при создании новаторской комплектующей системы Robolink. По его словам, при разработке гуманоидов они тратят огромное количество времени на механизмы, но уже долгое время мечтают об эффективной модульной системе.
Поэтому необходимо было снизить время разработки так, чтобы программисты искусственного интеллекта могли подключиться к процессу раньше. К счастью, компания igus обладает многолетним опытом практической работы как с антропоморфными, так и с промышленными роботами. Например, многие шестикоординатные роботы по всему миру оснащаются многокоординатной системой ВЧ связи по кабелю Triflex R производства igus.
Поддержание низкой движущейся массы
Роботизированное устройство преимущественно разрабатывается для производителей роботов и лабораторий, которые работают с антропоморфными системами, а также с облегченными конструкторскими решениями для осуществления операций и автоматизации. Основной целью разработки компании igus было максимальное снижение движущейся массы для того, чтобы можно было отделить силовые приводы от функционирующих устройств, таких как зажимы, руки, чашечные присоски и т.д. Особое внимание было уделено возможности быстрой сборки и простому в эксплуатации дизайну, а также использованию трибо-оптимизированного пластика для обеспечения отсутствия замасливания и легкого веса.
Простота конфигурации шарниров робота
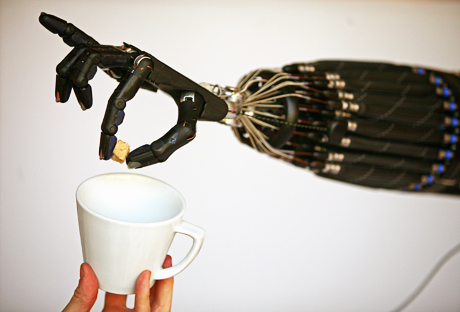
Robolink состоит из устройства привода и контроля, шарниров разной длины и рук разного размера, а также канала для дополнительных тросов управления. На конце этой системы, компания предлагает установить варианты крепления к различным типам устройств. Поскольку система является модульной, она может быть сконструирована с любыми видами конфигураций: начиная с сочлененных рук, двигающихся рук-«копателей», и заканчивая «существами» на четырех ногах. Шарниры могут быть скомбинированы по требованию.
Износоустойчивость и управление
Устройство привода и контроля было специально спроектировано как «черный ящик». Таким образом, производители роботов имеют возможность работать с пневматикой, электротехникой или гидравликой. Сочлененные руки сделаны из пластика, армированного углеродным волокном, и других облегченных материалов. Бионический каркас частей скелета робота — это шарниры из пластика, полученного литьем под давлением. Они контролируются натяжением кабеля, которое придает растягивающее усилие, подобно тому, как функционируют сухожилия в человеческом организме. Оболочка кабеля остается на месте, а двигается только внутренний кабель. Таким образом приводится в движение любое устройство, будь то зажим, лопата или крюк.
Сами кабели производятся из промышленных синтетических волокон. Они очень прочны, с трудом растягиваются, противостоят химическому воздействию, не содержат смазки и очень износоустойчивые. По сравнению со сталью, их легкий вес позволяет экономить электроэнергию. По словам Управляющего директора Фрэнка Блейза (Frank Blasе), новая модульная система предоставляет производителям антропоморфных роботов настоящие преимущества: облегченный вес и готовые механические решения для будущих разработок.

Comments (0)
Twitter
Facebook
Pinterest
E-mail