
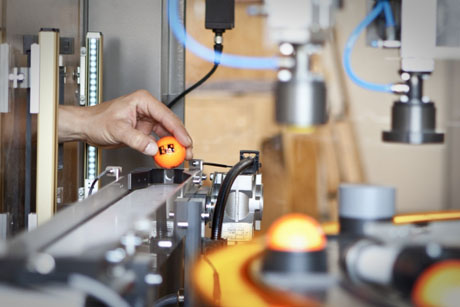
Для упаковки мячиков для гольфа были синхронизированы три робота: робот с сочлененной рукой, трипод и картезианский робот. Фото: neue-verpackung.de
Показанная в прошлом году на выставке Interpack упаковочная машина Packer — пример динамической приводной технологии с точной синхронизацией отдельных осей, кулачков и робототехники, пишет Upakovano.ru. Packer представляет собой демонстрационную машину, которая была разработана, построена и запрограммирована специально для презентации возможностей технологий компании B&R. В этой машине нашли свое воплощение современные концепции манипулирования, обработки изображений, техники безопасности, а также обслуживания и контроля.Для упаковки мячиков для гольфа были синхронизированы три робота с различной кинематикой (робот с сочлененной рукой, трипод и картезианский робот) на круглом столе с подаваемыми мячиками. Вся установка с 15 осями, включая управление процессами и визуализацию, управляется одним центральным процессором (в данном случае — промышленным компьютером). Различная кинематика трех роботов встроена в управление. Через открытый кинематический интерфейс возможна реализация любой кинематики. Универсальный интерпретатор позволяет использовать стандартные команды для программирования процессов или же определять собственные команды для процессов. Таким образом, в значительной степени сокращено время для установки управляющей программы манипулирующей системы.
Различные мехатронные модули и станции машины связаны между собой общей коммуникационной линией Powerlink. Опциональные машинные модули могут быть отсоединены или добавлены во время работы машины. Они автоматически распознаются в сети, и соответствующее программное обеспечение активируется или дезактивируется. Приводы роботов-манипуляторов встроены в общую концепцию приводов всей машины. Приводы, управляющие процессами и манипуляциями, могут быть собраны вместе в компактный и экономичный узел. Установка заданных значений движения осей производится посредством технологии комплексного управления движением Generic Motion Control на центральном пульте управления машиной. Эта технология обрабатывает данные о роботах и процессах в общей базе, полностью синхронизируя их. Благодаря этому, применяемое в традиционных решениях соединение с шиной, бывшее узким местом, полностью устраняется. Прозрачное сохранение данных дает возможность реализации новых функций, осуществление которых ранее было невозможно из-за задержки цикла шины в коммуникации между машиной и роботами. Рабочий процесс может быть оптимально согласован с процессом обработки данных. Производительность и время работы машины увеличиваются. Кроме того, полностью отпадают затраты, связанные с раздельным управлением роботами, отдельным шкафом управления роботами и интерфейсом связи.
Синхронное управление движением
В машине Packer различные приводные технологии объединяются при помощи шаговых двигателей, преобразователей частот и сервоприводов. Соответствующие технологии можно применить именно в том месте, где они проявляют свои сильные стороны. Серводвигатели AC-Servo, линейные и ротационные прямые приводы обеспечивают динамичное и точное движение. Шаговые двигатели с обратным ходом и без такового отлично подходят для роли малых прямых приводов или перемены формата. Полностью встроенные в программируемую систему частотно-управляемые асинхронные приводы представляют собой экономичное решение там, где не требуется высочайшая скорость или динамика.

Синхронизация приводов, достигаемая при помощи технологии Generic Motion Control, обеспечивает повышение производительности машины и качества продукции. Смена формата продукции может осуществляться на работающей машине. Все виды приводов равноправно функционируют в комплексе с идентичным исходным кодом. Это означает максимум гибкости для машиностроителей, поскольку они могут свободно выбирать вид привода. Интеграция всех приводов при помощи технологии комплексного управления Generic Motion Control обеспечивает полную масштабируемость технологии и работы. Время, необходимое для программирования, сокращается, поскольку все переменные данные приводов в системе программирования немедленно предоставляются в распоряжение.
Посетители могли взаимодействовать с машиной непосредственно, подойдя к ней через специальную фоторелейную завесу безопасности. Как только световая завеса сообщает о приближении оператора к машине, машина переходит в рабочий режим с определенной скоростью. Сверхбыстрая реакция машины достигается благодаря прямой децентрализованной коммуникации Powerlink всех узлов безопасности с центральным узлом SafeLOGIC через протокол безопасности openSAFETY. Для создания безопасной приводной техники имеются более 20 различных функций управления движением Safe Motion Control. Для осуществления безопасного движения робота с максимально возможной регулируемой скоростью в машине Packer были представлены функции безопасности, такие как ограниченная скорость в центре инструмента (Tool Center Point — TCP). При этом данные о расположении каждой оси робота передаются в узел SafeLOGIC. На основе соответствующей кинематики робота рассчитывается актуальная скорость захватов робота. В противоположность ограничениям скорости на каждой отдельной оси возможно длительное использование максимально разрешенных скоростей в центре инструмента, что способствует повышению производительности. Короткое время реакции способствует упрощению обслуживания и повышению производительности оборудования.

Дефектные мячики, имеющие отклонения в цвете, распознаются и отбраковываются встроенной системой обработки изображений. Связь между системой обработки изображений и центральным процессором осуществляется также через системную шину Powerlink. Короткое время цикла в диапазоне микросекунд способствует надежному установлению связи каждого изображения с соответствующим продуктом. Синхронное соединение дешифрования фотоизображений и процесса обеспечивает значительное повышение производительности специально для высокоскоростных машин. Представленная система обработки изображений полностью встроена в систему проектирования Automation Studio, что экономит время, затрачиваемое на программирование.
Простое объединение в линию
Машина демонстрирует технологию PackML, при помощи которой между техникой различных производителей на основе разных платформ управления может быть установлено унифицированное обслуживание машины посредством стандартизированных режимов и состояний, а также унифицированная коммуникация с автоматизированной отраслевой системой MES (Management Execution System) или системой сбора и учета производственных данных.

Через беспроводную сеть пользователь может посредством iPad получить доступ к машинной визуализации и встроенной системе диагностики (System Diagnose Manager — SDM). System Diagnose Manager представляет собой инструмент диагностики, который обеспечивает дистанционный доступ к сервисному персоналу, проверяет и диагностирует функции всех компонентов машины при помощи фирменного программного обеспечения. Доступ производится через единственный интерфейс всей машины. Функционирование роботов, технологических процессов, систем безопасности и визуализации может эффективно диагностироваться в любом уголке планеты. Функции диагностики, которые ранее программировались специально и стоили недешево, сейчас уже имеются в System Diagnose Manager, что упрощает диагностику и сокращает время выполнения проекта.
Пример конкретной машины
Благодаря устранению системных ограничений, которые существовали ранее между системами обработки изображений и управления машиной, робототехникой и процессом, функциональным управлением и точными приводами, решение компании B&R в области автоматизации позволяет запросто реализовать функции, недоступные ранее. Конкретный пример тому — представленный изготовителем станков Trumpf самый быстрый гибочный пресс. Центральный процессор B&R управляет при этом всем участком, состоящим из электрического гибочного пресса и двух роботов.
Машиностроители экономят благодаря интеграции всех компонентов автоматизации ценное время программирования. Модульное построение систем позволяет разработать машинный код, независимый от аппаратного обеспечения. Таким образом, на базе одного программного проекта могут быть реализованы разные конфигурации машин с различным оборудованием.

Comments (0)
Twitter
Facebook
Pinterest
E-mail