

Один из крупнейших в США производителей химикатов для дезинфекции плавательных бассейнов и спа, компания Arch Chemicals (Чарлзтаун, Теннеси), столкнулась с задачей повышения скорости, эффективности и эргономичности процесса формирования палет из контейнеров на выходе из двух производственных линий, сообщает Upakovano.ru.
Arch Chemicals Inc. — одна из ведущих мировых компаний по производству биоцидов с ежегодным оборотом более 1 млрд долларов США, и ее продукция для обработки бассейнов под маркой HTH и другими пользуется популярностью во всем мире.
«Старая механическая система, которая могла обрабатывать за один раз лишь один контейнер, перестала справляться с работой», — говорит Дэйв Соур (Dave Sauer), инженер-технолог завода. Кроме того, вакуумные захваты, которые используются во многих роботизированных палетизаторах, не могут работать с контейнерами разных размеров, варьирующихся от двухфунтовых банок до бочек на 275 фунтов (124,74 кг). Компания обратилась за помощью в решении непростой задачи к фирме-интегратору Automation Project Group (APG).
Arch Chemicals имеет две одинаковые производственные линии. Поэтому компания APG установила два роботизированных участка палетирования, каждый из которых оснащен роботом IRB 660 производства ABB Inc. «У нас на заводе уже был один робот ABB, так что нам понравилось решение APG установить новые роботы ABB», — говорит Соур. Специально предназначенный для формирования палет промышленный робот-палетизатор IRB 660 сочетает отличную скорость и радиус действия с высокой грузоподъемностью до 550 фунтов (249,48 кг). Все это подошло для формирования палет из разных контейнеров Arch Chemicals.
Контейнеры при помощи транспортера доставляются на каждый роботизированный участок, где робот поднимает их и помещает на поддон. Крупные контейнеры слишком тяжелы для вакуумных захватов, поэтому роботы оснащены специальными захватами, укрепляемыми на конце руки манипулятора, которые разработала фирма APG.
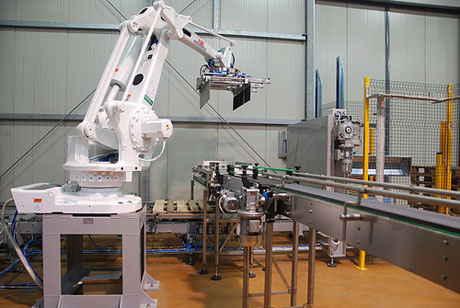
Робот ABB IRB-660
Рабочий захват включает нижнюю металлическую пластину и несколько вертикальных вил с неподвижно закрепленной задней пластиной. Робот запускает нижнюю пластину под контейнер, после чего вилы обжимают его и толкают к задней пластине. Затем манипулятор робота переносит контейнер на палету, и процедура проходит в обратном порядке. Нижняя пластина служит для поддержки груза, а вилы и задняя пластина стабилизируют его и придерживают во время транспортировки.
В зависимости от размера контейнеров палеты укладывают в четыре или пять слоев. Главное состоит в том, что захваты самостоятельно настраиваются на работу с контейнерами разного размера при помощи автоматической системы настроек. Оператор при помощи интерфейса типа «человек-машина» выбирает продукцию, которая будет укладываться на палеты. В процессе выбора автоматически устанавливается количество контейнеров в штабеле и количество штабелей, укладываемых на палету. Роботы оснащены фотоэлементами и датчиками, что позволяет им даже обнаруживать неправильные палеты.
«Главной проблемой для APG было выиграть пространство в конце обеих производственных линий, — объясняет Соур. — APG сделала большую работу. С нашей старой механической системой палетирования мы не могли работать с маленькими контейнерами. Сейчас мы можем формировать палеты из контейнеров всех размеров».
По словам Соура, манипулятор робота находится на цоколе высотой 1,828 м, что обеспечивает хорошую рабочую зону для инструмента на конце манипулятора.
Химикаты для бассейнов создают среду, вызывающую коррозию, поэтому оборудование нуждается в регулярной промывке. Впрочем, роботы ABB достаточно прочны, чтобы работать в неблагоприятной рабочей среде.
Кроме повышения производительности, система APG решила еще одну задачу. Старая механическая установка для палетирования не обеспечивала полностью полностью автоматического формирования палет. Примерно 15% палет укладывались вручную. Сейчас все контейнеры укладывают на поддоны роботы.

Comments (0)
Twitter
Facebook
Pinterest
E-mail